
게임소개
로봇의 세계: 배터리 수명을 위한 전투
로봇이 없으면 생명도 없다
노로봇 노라이후
참고:
느린 장치에서 최적의 성능을 얻으려면 게임 내 설정을 조정하세요. "그림자"를 0으로 설정하고 "그리기 거리"를 02로 설정하세요.
이것은 사전 알파 빌드입니다. 게임 플레이는 향후 업데이트에서 변경될 수 있습니다.
게임플레이 하이라이트:
-
모듈식 로봇 설계: 메뉴를 사용하지 않고도 팔다리와 몸을 다른 로봇과 실시간으로 원활하게 교환할 수 있습니다. 애니메이션은 동적으로 업데이트됩니다.
-
고유한 사지 능력: 각 사지는 고유한 기능을 제공합니다. 다양한 팔다리를 결합하면 엑스레이 비전, 플라즈마 보호막, 스텔스 위장, 야간 투시 및 초고속과 같은 특수 능력이 잠금 해제됩니다.
-
지능형 AI: 적과 중립 AI는 플레이어와 동일한 사지 기반 능력 시스템에서 작동합니다.
-
다양한 교통 수단: 오토바이, 자동차, 트럭, 대형 로봇 등을 이용해 세계를 탐험하세요(추가 차량 예정).
-
동적 재고: 실시간 애니메이션 전송을 통해 차량 간에 무기와 탄약을 운반할 수 있습니다. 메뉴가 필요하지 않습니다.
-
지속적 세계: 떨어뜨린 아이템, 팔다리, 무기, 차량 상태 및 전체 환경을 포함한 모든 상호 작용이 저장됩니다.
-
즉각적인 신체 교체: 빠른 전신 교체를 위해 "TerePods"(수리 및 운반 포드)를 활용하세요. 이 포드는 제한된 범위를 확장하기 위해 트럭에 장착할 수 있습니다. 향후 업데이트에는 기능 교체 및 빠른 이동 포드가 포함될 예정입니다.
1.23a 알파 이전 – 재미있는(및 디버그) 기능(물리적 키보드 필요):
다음은 디버그 기능이므로 최종 릴리스에 포함되지 않을 수 있습니다. note
F12를 눌러 콘솔에 액세스하세요.
콘솔 명령:
디버그바디 표시
: 시작 영역의 냄새 스테이션에서 고유한 능력을 갖춘 사용 가능한 테스트 바디를 표시합니다. 저장된 변경 사항은 영구적이지만 게임 시작 시 이러한 몸체는 로드되지 않습니다.이 본체를 로드하는 데 TerePod를 사용하지 마십시오.텔레포트(지역 코드)
: 플레이어를 지정된 지역으로 텔레포트합니다.- 지역 코드: 0(Starter Area), 1(Smelter Base Area), 2(Polybius Area), 3(Big Digger 2 Area), 4(Abandoned Base Area), 5(Center Area), 6(Vehicle Repair) 영역)
위로 순간이동-(높이)
: 플레이어를 지정된 높이만큼 위로 순간이동합니다. 추락 피해 및 애니메이션을 테스트하거나 더 높은 위치에 도달하는 데 유용합니다.teleport lastsave
: 플레이어를 마지막 저장 지점으로 되돌립니다.detach (BodyPart)
: 지정된 신체 부위를 분리합니다. 옵션: 머리, 팔L, 팔R, 다리L, 다리R, 팔, 다리, 모두.-
disable immunities: 모든 로봇 면역을 제거합니다. -
reboot: 로봇을 재설정합니다.
스크린샷




리뷰
댓글 게시
최신 기사
2025년 구매해야 할 최고의 던전 앤 드래곤 책
다루앤드드래곤이 황금기를 맞이하고 있다고 해도 과언이 아니다. \가 촉발한 향수 바람부터 \의 박스오피스 성공, 유튜브와 팟캐스트에서의 테이블탑 콘텐츠 급증, 그리고 기록적인 인기를 끌고 있는 \에 이르기까지, 지금이 롤플레이딩 게임 세계로 뛰어들기에 완벽한 시기다. 완전히 초보자이거나 오랜만에 다시 돌아온 주자 모두에게 2025년은 게임을 한 단계 끌어올려 줄 놀라운 D&D 서적들을 풍부하게 제공한다.D&D를 얼마나 자주 플레이합니까?일주일에
‘폴아웃’ 시리즈, 5~6시즌 제작 예정… ‘맥시머스’ 스타가 밝힌다
Fallout TV 쇼는 얼마나 계속될까?Brotherhood의 입문자인 Maximus 역을 맡은 Aaron Moten에 따르면, Fallout TV 시리즈의 제작진은 5~6시즌까지의 핵겨울 계획을 세우고 있을 수 있다. Comic Con Liverpool에서 이 배우는 프로듀서들이 처음부터 다 시즌 스토리 아크를 설계했다고 밝혔다.다섯 시즌 동안 이어지는 황무지 여정?"제가 이 시리즈에 합류했을 때, 크리에이터들은 여러 시즌을 아우르는 명확한

크런치롤, 안드로이드 라이브러리에 신짱 게임 추가
신짱: 시로와 석탄 마을이 이제 크런치롤 게임 보트를 통해 안드로이드에서 이용 가능합니다. 이 일상 모험 게임은 2024년 2월 일본에서 닌텐도 스위치로 처음 출시되었으며, 이어 2024년 10월에 전 세계적으로 스위치와 PC 버전으로 발매되었습니다. 드디어 모바일 데뷔가 이루어졌습니다.신짱: 시로와 석탄 마을은 신비로운 애니메이션 모험이야기는 히로시가 고향 근처에서 직업을 얻은 후 노하라 가정이 아키타현의 한적한 마을로 이사하는 것으로 시작됩
포켓몬 자판기: 내부 내용 및 위치
소셜 미디어에서 포켓몬 팬으로 활동한다면, 포켓몬 자판기에 대한 대화를 종종 접했을 것입니다. 포켓몬 컴퍼니가 미국 전역에 자판기를 확장하면서 팬들 사이에서 질문이 늘어나고 있으며, 우리는 그 답을 가지고 있습니다.포켓몬 자판기란?포켓몬 자판기는 다양한 공식 굿즈를 제공하는 자동화된 키오스크로, 음료를 사는 것처럼 간편하지만 종종 예산에 부담이 될 수 있습니다.수년간 여러 모델이 등장했지만, 미국에서 주목받고 있는 자판기는 2017년 워싱턴 주

하츠네 미쿠, 토람 온라인 MMORPG에 등장
하츠네 미쿠가 토람 온라인의 세계로 입장합니다 독점 콜라보레이션 의상과 아바타를 만나보세요 이벤트 시작일: 1월 30일 아소비모 주식회사는 인기 MMORPG '토람 온라인'에 가상 팝 스타 하츠네 미쿠가 출연하는 새로운 콜라보레이션 이벤트를 발표했습니다. "미러클 미래 2024"라는 제목으로 이번 크로스오버는 1월 30일에 시작되며, 이 유명한 가수가 인기 MMORPG 판타지 세계로 들어옵니다.이번 한정 기간 동안 플레이어들은 독점 콜라보
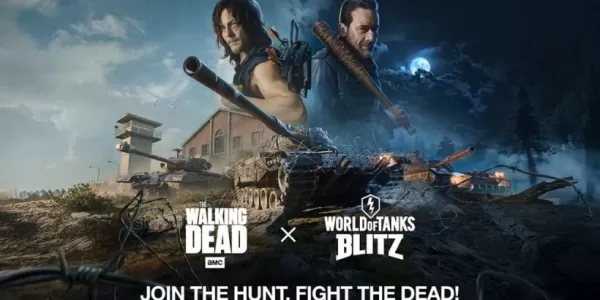
월드 오브 탱크스 블리츠, AMC의 ‘더 워킹 데드’ TV 시리즈와 협업 발표
《워킹 데드》가 《월드 오브 탱크스 블리츠》에서 스릴 넘치는 크로스오버 이벤트를 선보입니다!이 모험은 대릴 딕슨이 주도하는 “올 아웃 워” 이벤트로 시작되며, 독점 협력 보상이 제공됩니다.시리즈의 상징인 네간이 등장하는 퀘스트에 참여하여 새로운 “인펙티드 프론트” 모드를 체험해 보세요.TV에서 좀비 문화를 부활시키는 데 가장 크게 기여한 작품은 단연 《워킹 데드》입니다. AMC가 제작한 이 유명한 다크 호스 코믹북 시리즈는 전 세계적으로 포스트
No Robots No Life 같은 게임

Spring Valley
모험丨154.1 MB

FPS Strike Ops : Modern Arena
모험丨167.0 MB

Death Park 2: Horror Clown
모험丨181.0 MB

Вокруг мира
모험丨255.2 MB

Cats are Liquid - ABP
모험丨90.5 MB

Horror Tale
모험丨131.4 MB

Shadow Hunt
모험丨169.2 MB
최신 게임

Яркие слоты - игровые аппараты
카드丨33.20M

Jet Gaming
카드丨12.80M


4Play - Mau Binh Online
카드丨47.60M

Дурак на Раздевание +18
카드丨24.60M

Contract Bridge for Mobile
카드丨2.50M

Lucky Devil
카드丨82.40M











주요 뉴스
더 +

01
01-16
젠리스 존 제로, 버전 1.5 특별 프로그램 확정 Livestream 날짜 및 시간
요약Zenless Zone Zero는 버전 1.5 "Astra-nomical Moment"의 시작일을 1월 10일 19:30(UTC 8)에 공개했습니다. 버전 1.5에서는 S랭크 캐릭터 Astra Yao와 Evelyn Chevalier를 추가할 계획입니다. 버전에 대해서는 그 외에 알려진 바가 많지 않습니다. 1.5. 최근 유출로 인해 많은 새로운 콘텐츠와 이벤트가 공개되었습니다.
02
04-18
"Jurassic World Rebirth Trailer는 여름 출시 전에 공룡 혼돈을 공개합니다."
Jurassic World Rebirth는 Super Bowl 일요일 동안 2025 년 7 월 초연을 기대하면서 더 많은 공룡 행동을 보여주는 특별한 트레일러와 함께 포효하는 입구를 만들었습니다. 최신 장면에는 별 Scarlett Johansson과 Mahershala Ali가 있습니다.
03
01-21
Final Fantasy 업데이트로 컨트롤러 결함 수정
FINAL FANTASY VII 리메이크용 패치는 이제 Steam, Epic Games Store 및 PlayStation 5에서 다운로드할 수 있습니다. 이 업데이트는 컨트롤러 진동 모터 관련 문제를 해결합니다. 이 게임은 전 군인이었던 Cloud Strife가 Shinra Electric Power Company의 파괴를 막기 위해 Avalanche에 합류하는 과정을 따릅니다.
04
12-12
Wuthering Waves의 'In the Turquoise Moonglow' 업데이트에서 몰입형 모험이 기다립니다.
Wuthering Waves 버전 1.2 업데이트: "In the Turquoise Moonglow" 미리보기
Wuthering Waves 플레이어 여러분, 준비하세요! Kuro Games는 많은 기대를 모았던 버전 1.2 업데이트의 1단계를 8월 15일에 출시합니다. 새로운 예고편에는 새로운 레저네이터, 새로운 무기, 질문 등 흥미로운 추가 사항이 공개되었습니다.
05
04-24
"모래 언덕 : 베타에서 영감을 얻은 변화를 위해 3 주 연장 된 각성 지연"
Dune : Awakening, Frank Herbert의 상징적 인 공상 과학 소설과 Denis Villeneuve의 영화에서 영감을 얻은 매우 기대되는 오픈 월드 생존 MMO 인 Awakening은 2025 년 6 월 10 일의 새로운 출시일로 되돌아갔습니다.


